[gtranslate]
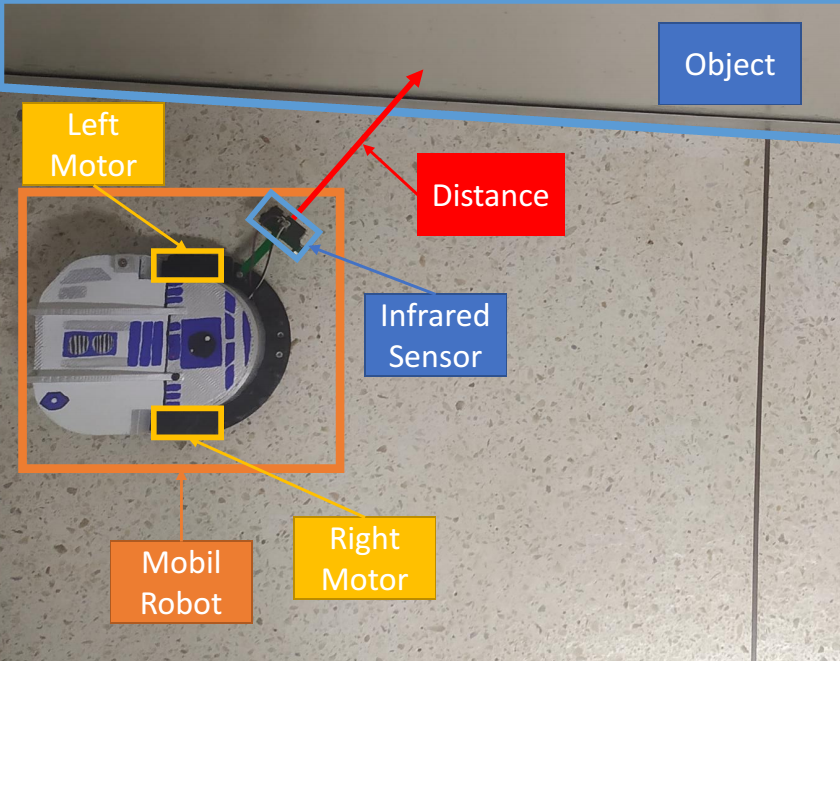
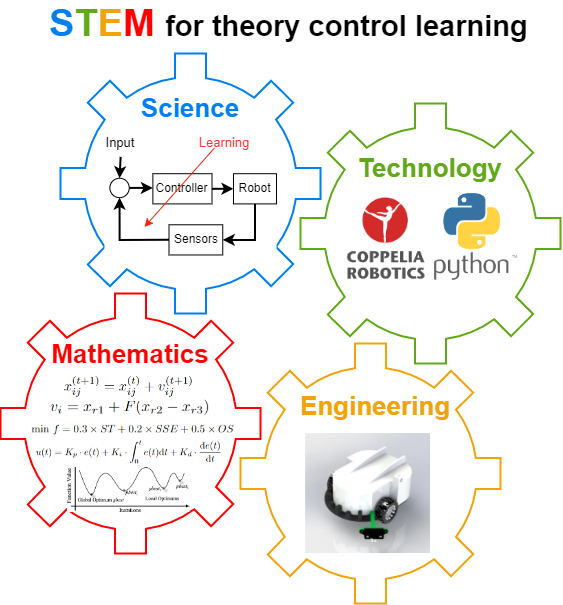
EVA é uma plataforma robótica educacional de baixo custo utilizada para ensino de sistemas de controle.
Resultados
Nos seguintes links encontram-se vídeos de divulgação dos principais resultados alcançados com esta plataforma.
- Online tuning PID controller, training scenario 1: https://www.youtube.com/watch?v=grfqa-nI2VE
- Online tuning PID controller, validation scenario 2: https://www.youtube.com/watch?v=GvO9iEWxDPQ
- Online tuning PID controller, validation scenario 3: https://www.youtube.com/watch?v=DalLc7KJ02s
- Online tuning PID controller, validation scenario 4: https://www.youtube.com/watch?v=GYBmkTSd5KE
Publicações relacionadas:
- M. A. Pastrana, K. R. Santos, A. B. C. de Farias and D. M. Muñoz, “Data-Driven Control and Behavior-Based Control Applied to a SISO Mobile Robot,” 2022 Latin American Robotics Symposium (LARS), 2022 Brazilian Symposium on Robotics (SBR), and 2022 Workshop on Robotics in Education (WRE), São Bernardo do Campo, Brazil, 2022, pp. 395-400, doi: 10.1109/LARS/SBR/WRE56824.2022.9995802.
- M. A. Pastrana, L. H. Oliveira, M. S. Santana, V. C. Oliveira, J. Mendoza-Peñaloza and D. M. Muñoz, “Hardware Implementation of a GMDH Controller for Mobile Robot Obstacle Following/Avoidance,” 2023 Latin American Robotics Symposium (LARS), 2023 Brazilian Symposium on Robotics (SBR), and 2023 Workshop on Robotics in Education (WRE), Salvador, Brazil, 2023, pp. 206-211, doi: 10.1109/LARS/SBR/WRE59448.2023.10332957.
- M. A. Pastrana, J. Bautista, J. Mendoza-Peñaloza, L. H. Oliveira, D. A. Mendes and D. M. Muñoz, “Teaching Control Theory using Mobile Robot Obstacle Following/Avoidance with CoppeliaSim and MFO Algorithm.,” 2023 Latin American Robotics Symposium (LARS), 2023 Brazilian Symposium on Robotics (SBR), and 2023 Workshop on Robotics in Education (WRE), Salvador, Brazil, 2023, pp. 579-584, doi: 10.1109/LARS/SBR/WRE59448.2023.10333042
- M. A. Pastrana, L. H. Oliveira, D. A. Mendes, D. L. Silva, J. Mendoza-Peñaloza and D. M. Muñoz, “Implementation of a PID Controller using Online Tuning Applied to a Mobile Robot Obstacle Following/Avoidance,” 2024 Argentine Conference on Electronics (CAE), Bahía Blanca, Argentina, 2024, pp. 10-15, doi: 10.1109/CAE59785.2024.10487152