[gtranslate]
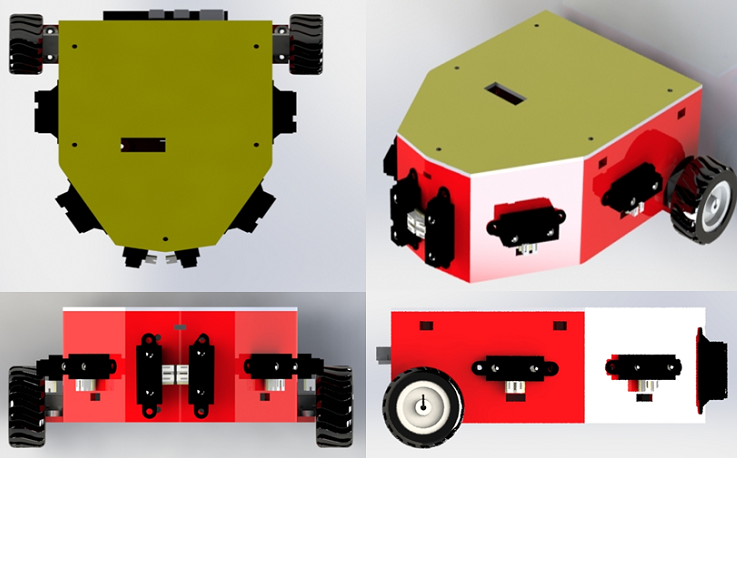
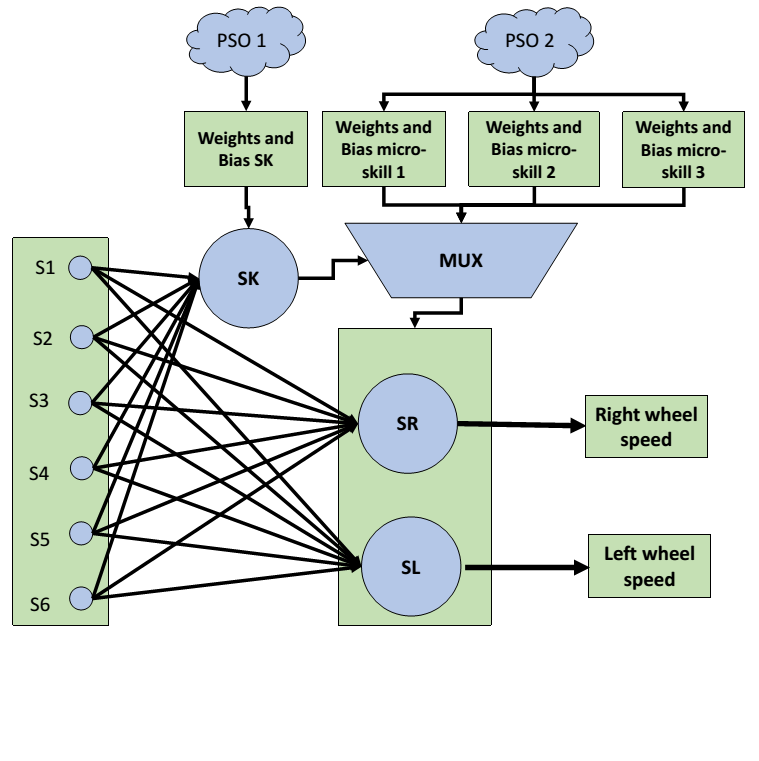
MARIA é uma plataforma robótica baseada em aprendizagem por demonstração. O robô MARIA utiliza …
Resultados:
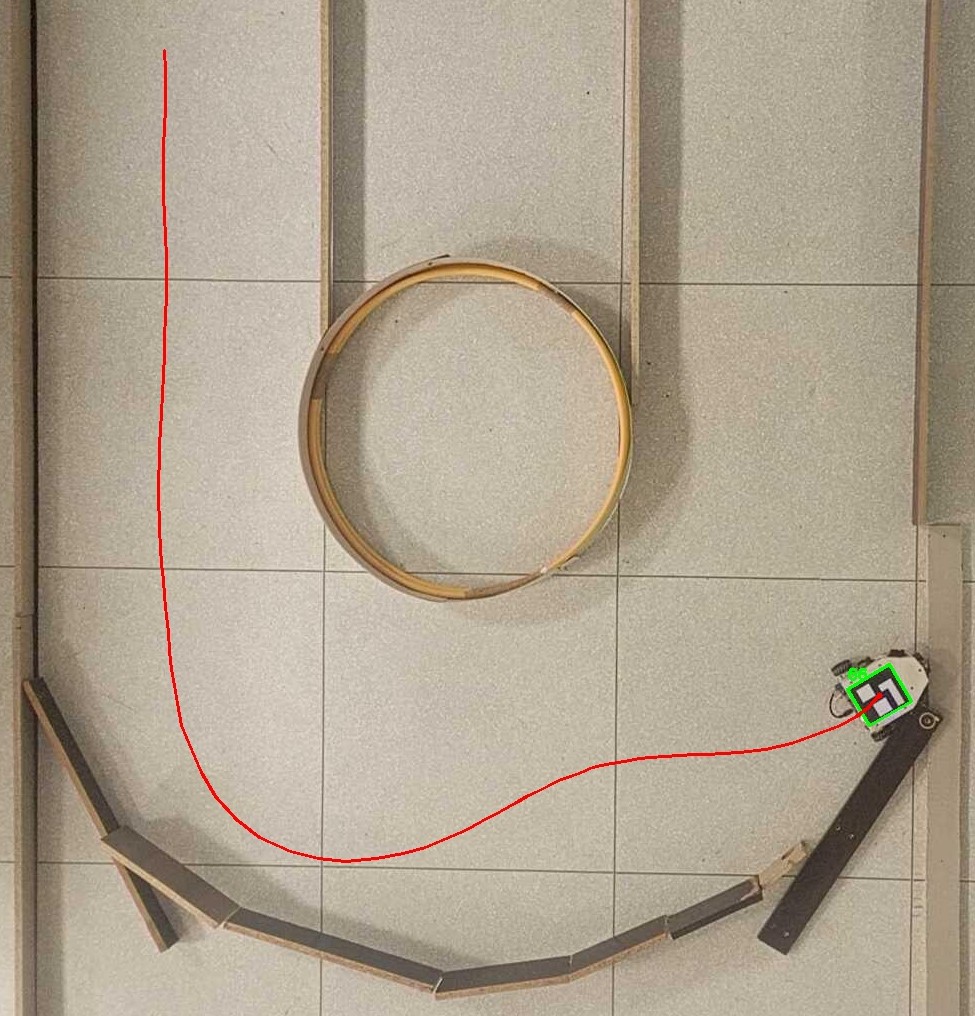
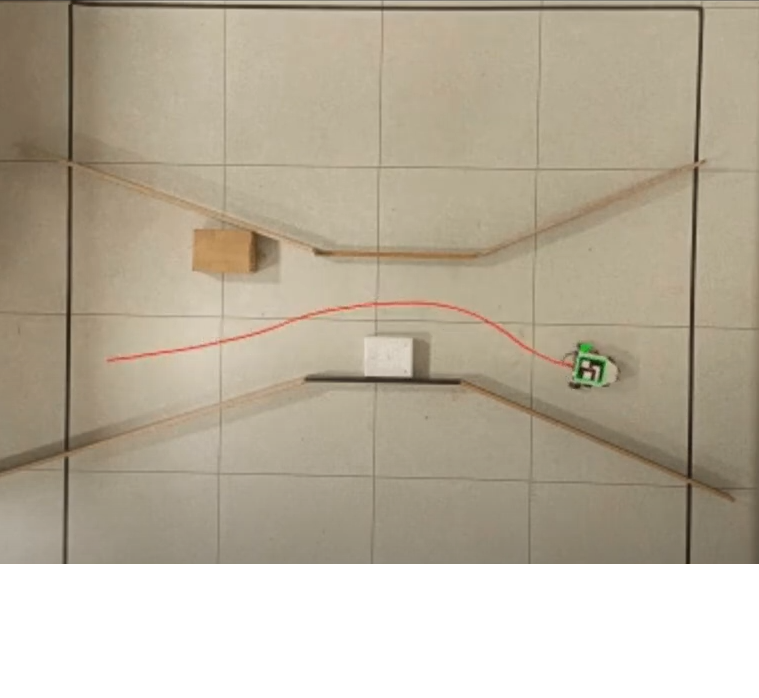
No seguintes links encontram-se vídeos de divulgação dos principais resultados alcançados com esta plataforma.
- Imitation on unknown scenario: https://www.youtube.com/watch?v=oIOtPFCnFiY
- Imitation on unknown scenario: https://www.youtube.com/watch?v=006aJa_DyA0
- Imitation on unknown scenario: https://www.youtube.com/watch?v=OiBsSVGaLDk
Orientações:
- Dissertação de mestrado em Sistemas Mecatrônicos de Mario Andrés Pastrana Triana: “Controle Baseado Em Comportamento Aplicado A Robótica Móvel Usando Hardware Reconfigurável“, 2022. Orientador: Prof. Daniel Muñoz Arboleda
- TCC em Engenharia Eletrônica de Luiz Henrique Nunes de Oliveira: “Aprendizado por Demonstração Aplicado em uma Plataforma de Robótica Móvel usando Redes Neurais Recorrentes“, 2023. Orientador: Prof. Daniel Muñoz Arboleda
- TCC em andamento em Engenharia Eletrônica de Lukas Araújo da Silva: “Desenvolvimento de técnicas de composição de micro-habilidades em um robô móvel com capacidade de aprendizagem por demonstração“, 2024. Orientador: Prof. Daniel Muñoz Arboleda