[gtranslate]
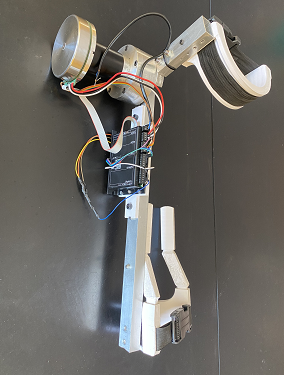
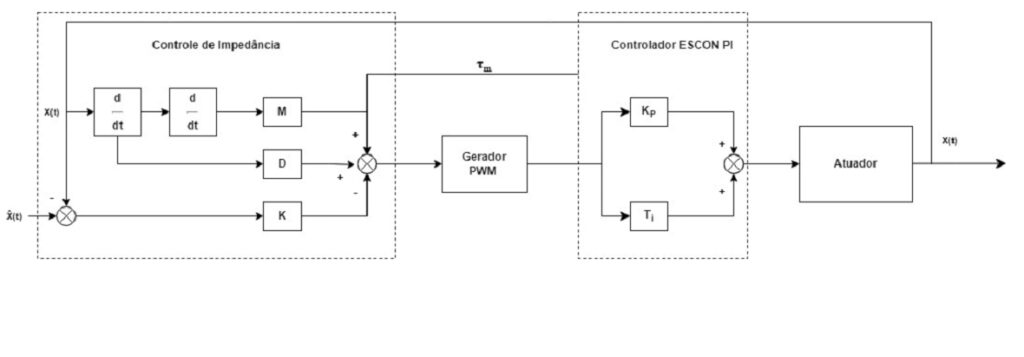
Uma órtese de joelho foi desenvolvida com motor Maxon e controlador ESCON. Foi explorada a técnica de controle de impedância para controlar a força do sistema em dois modos de operação. a) modo 1: auxílio ao movimento; modo 2: oposição ao movimento.

Resultados:
No seguintes links encontram-se vídeos de divulgação dos principais resultados alcançados com esta plataforma.
- Modo auxílio ao movimento: https://www.youtube.com/watch?v=pK_FQLGaXPY
- Modo oposição ao movimento: https://www.youtube.com/shorts/iYVaVecch7A
Orientações:
- TCC em Engenharia Eletrônica de Victor Rangel: “Órtese Motorizada para Joelho Utilizando Sistemas Microcontrolados“, 2024. Orientador: Prof. Daniel Muñoz Arboleda
- TCC em andamento em Engenharia Eletrônica de Adriana Aguiar: “Automação de uma Órtese Motorizada de Joelho com Controle de Força“, 2024. Orientador: Prof. Daniel Muñoz Arboleda